| 受伤后还能“自愈”的机器鱼 为解决塑料危机带来新希望 |  打印本文 打印本文  关闭窗口 关闭窗口 |
|
塑料,是我们日常生活中寻常可见之物,如今,塑料污染已成人类大敌,形成了所谓的“白色污染”。实际上,比“白色污染”更可怕的,是在无形之中悄然威胁生物健康的“微塑料”污染。 近年来,随着科学家相继在多个海域的水体和沉积物中发现微塑料,人们意识到了微塑料污染已经成为了一个全球性的环境问题。海洋中的微塑料是一种新型的污染物,颗粒小、数量多、分布广且易于被海洋鱼、贝类等生物体摄食并富集,进一步随着食物链的传递,会对海洋生物的生存以及人类健康造成严重威胁。 近日,四川大学高分子材料工程国家重点实验室张新星教授团队开发出了一种集成化的软体机器人――由光驱动的机器鱼,它能快速“游动”,捡起并清除微塑料。这种机器鱼打破了软体机器人功能执行和快速运动的相互排斥性,实现了更高程度的集成化与智能化。不仅如此,这种材料在切割后还能自我愈合。日前,相关成果发表在国际学术期刊《纳米快报》上。
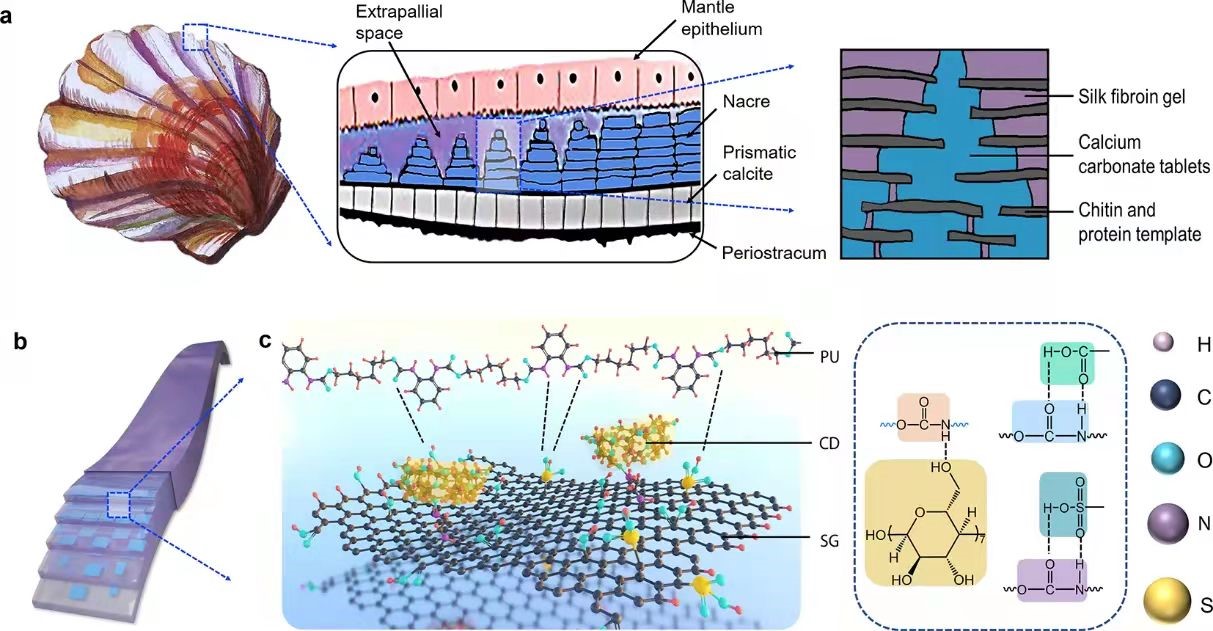
软体机器人材料结构设计。受访者供图 清除微塑料 软体机器人材料需具备多种性能 微塑料在地球上几乎无处不在,在水域环境中尤其多,一旦它们落在水道底部的角落和缝隙中,便很难从水生环境中去除。针对这一情况,目前常用的解决方案是使用小型、灵活和自行推进的软体机器人来清除这些污染物。 “软体机器人在复杂的水域环境中作业,需要具备较高的适应性和环境耐受性等条件,在含盐量不同或者酸碱环境不同的水域中都能适应自如。”论文第一作者、四川大学高分子研究所博士生王宇嫣说,在水域条件下工作,软体机器人不可避免会遭受水流的冲刷,这要求机器人材料必须满足一定的机械强度,若机器人材料在水中遭受破坏或者碎裂,又会产生新的微塑料。 实际上,现有的水生软体机器人通常都由水凝胶及硅橡胶制成,由于其结构、含水量、介质组成等固有条件,因此机械性能差,并且容易损坏。 目前,许多研究者在机器人的各种驱动方式和驱动速度方面取得了重大突破,比如引入机械手等额外的分离功能模块等。然而,这类嵌入式电子元件无疑会增加机器人的重量,不利于机器人快速稳定运行。此外,现有的水生软体机器人多为电机或燃油发动机驱动,难以满足环境友好和可持续驱动的需求。 “考虑到操作条件和经济成本,软体机器人的发展必然会朝着集成化、轻量化和智能化的方向前进。”王宇嫣说,一些研究通过引入功能填料实现了功能集成,但由于纳米结构设计的缺乏,使得制备的材料只能进行简单缓慢的弯曲或伸缩。 另一方面,由于实现材料的功能集成需要功能填料的高填充,而填料填充率高,又会导致复合材料柔性下降,在动态受力下容易开裂破损。“所以,如何平衡材料的功能与力学性能也成为了一个挑战。”她说。 仿照天然材料 克服功能执行与快速运动的矛盾 基于此,四川大学高分子材料工程国际重点实验室张新星教授团队从珍珠母贝(也称为珍珠层)这一天然材料的微观梯度中受到启发,仿制出了一种类似的梯度结构,为软体机器人创造出一种耐用可弯曲,并且可自动愈合的材料。 “我们发现,自然界中的珍珠层在无机物含量达到90%以上程度的时候依然能够同时保持强度和韧性。”据王宇嫣介绍,团队仿照珍珠层的微观梯度结构,将环糊精修饰的磺化石墨烯纳米片层以层层抽滤的方式,逐层递增组装到聚氨酯胶乳中,创造了有序的浓度梯度的纳米复合材料。“这样的制备方法不仅有效解决了功能填料高填充的难题,并且过程简单,有利于大规模制备。” 通过结构的改进设计,研究团队用这种新材料制成了一个15毫米(约半英寸)长的微型机器鱼,使其既能快速游动又能吸附微塑料,打破了软机器人功能执行与快速驱动的互斥性。 长期的可靠性是软体机器人在复杂条件下实际应用的先决条件。在实际操作中,材料的断裂极易引发重大的安全事故,研究团队发现,如果材料可以像人体一样能感知断裂,并能够及时进行阻止,进行“自我疗愈”,就能大大延长材料的服役寿命。 “我们在梯度组装的同时,创新性引入了功能填料与聚合物软基体之间的界面氢键。相比于传统的均匀分散的材料结构,新材料的层与层之间有许多超分子的相互作用,这就使得材料在被切割后还能自我愈合,仍然保持吸附微塑料的能力。”王宇嫣解释说,这样一来,高分子链和填料界面上的可逆动态键(多重氢键)在断裂后接触界面又能迅速重排,这使得聚合物界面的力学强度增大。界面动态氢键的断裂和重组在分子尺度上能量耗散,赋予了复合材料自动愈合的能力,也增强了拉伸能力。 为塑料危机带来曙光 新材料应用场景丰富 如今,在自然光等清洁能源的驱动下,这种新的梯度结构还使得“鱼身”膨胀不均匀,以此推动前进,机器鱼得以在水面畅快游行,并且能吸附微塑料,实现海洋环境的净化。 据了解,这种机器鱼可以每秒移动2.67个身长――这一速度比之前报道的其他软游泳机器人速度更快,与活跃的浮游生物在水中移动的速度大致相同。 王宇嫣表示,当前开发出的软机器人仅集成了水面微塑料定向收集功能,研究团队正尝试引入荧光发光基团,通过荧光基团对不同污染物的荧光响应性,进一步开发能够在水下在线检测微塑料污染物的新材料。 “我们还会持续跟进微塑料污染防控相关工作,针对微塑料环境污染及其风险防控难题,阐明多环境因素耦合作用下典型塑料制品的微塑料产生机制,揭示多介质复杂环境中微塑料的迁移传输机理与毒理效应,为微塑料环境基准建立提供科学依据。”王宇嫣说,如果直接把这些“鱼”投放到海洋里,就能收集并分析海洋中微塑料的组成,进而对塑料制品的加工和生产环节进行科学的设计指导,从源头减少或者阻断微塑料的产生。 当然,采集微塑料的功能只是其中的一种概念验证。张新星教授认为,随着研究深入,这种可愈合的新兴材料还将指导开发其他的功能,在太阳能发电、化学反应催化、生物医药、航空航天等领域展现出潜在的应用价值。 |